
Le attività riguardano sistemi autonomi intelligenti capaci di muoversi nell’ambiente, interagendo con esso, con molteplici applicazioni: robotica di servizio (domotica, cura degli anziani e dei disabili, intrattenimento e istruzione); robotica per lo spazio; robotica per sorveglianza e sicurezza; robotica per il monitoraggio ambientale ecc.
Con l’obiettivo di acquisire le conoscenze e gli strumenti per la realizzazione di sistemi mobili autonomi per l’ambiente terrestre, aereo e sottomarino, le attività di ricerca e sviluppo principali vertono su:
- teoria e applicazioni di sistemi di controllo;
- studio della cinematica, della dinamica, di sistemi perturbati, di filtri predittivi (es. Kalman) necessari alla guida autonoma o controllata a distanza di veicoli terrestri, aerei e sottomarini;
- sviluppo di controlli di alto livello (evitamento ostacoli, ripianificazione traiettorie);
- sviluppo di sistemi di intelligenza artificiale per la pianificazione e il compimento di missioni complesse, per la reazione a situazioni impreviste, per la modellazione dell’ambiente basata sull’integrazione di dati eterogenei multi sensoriali;
- sviluppo di sistemi di visione artificiale per la guida dei veicoli e per la percezione sensoriale.
I progetti di ricerca relativi a quest’area sono:
- RAS (Surface Antartic Robot),
- SARA (Sottomarino autonomo robotizzato antartico),
- PRASSI (Autonomous Robotics Platform for Emergency and Surveillance of Systems),
- SAM (Sottomarino autonomo mediterraneo)
-

- PRASSI

-

- PRASSI e MAGELLANO

-

- PRASSI e ZERO

-

- PRASSI equipaggiato con termocamera

-

- PRASSI in azione presso edificio F-65

-

- RAS

-

- Robot ZERO

-

- Robot sottomarino FALCON
-
- Robot sottomarino SARA

-

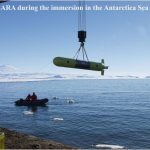
- Robot sottomarino SARA in antartide

-

- Robot Sottomarino SARA nella fase di prova

-

- SARA nel mare antartico

-
- Robot sottomarino SARA in immersione

-

- Vista frontale del robot sottomarino VENUS

-

- Il robot sottomarino Venus nel Lago di Bracciano

-

- Robot sottomarino VENUS nella piscina per i test
