
Le interfacce tra esseri umani e robot hanno caratteristiche particolari e complesse (il robot percepisce l’ambiente con sensori che potrebbero non essere facilmente riconducibili ai cinque sensi propri dell’uomo) che implicano lo sviluppo di tecnologie dedicate. Lo sviluppo di un’interfaccia intuitiva verso l’utente è ancora un campo di ricerca aperto e in continua evoluzione.
La telemanipolazione di sostanze radioattive, attraverso lo sviluppo del sistema master-slave con ritorno di forza denominato MASCOT, è legata agli albori dell’attività del Laboratorio di Robotica (a partire dagli anni 60).
In anni più recenti gli sforzi si sono diretti verso lo studio delle informazioni non verbali convogliate attraverso il linguaggio del corpo. L’interesse è verso la ricerca e lo sviluppo di:
- sistemi avanzati basati sul ritorno di forza, incluse le evoluzioni del MASCOT,
- interfacce basate su realtà virtuale e realtà aumentata,
- studio della comunicazione delle emozioni,
- interfacce grafiche per applicazioni a distanza,
- comunicazione multicanale con interpretazione semantica.
I progetti di ricerca relativi a quest’area sono:
- TINA (TElepresence INterface Architecture),
- SAITES (Sistema Autonomo Integrato per la Telegestione di Esperimenti Scientifici),
- TESEO (sistema per assistere e guidare cerebrolesi, il nome è ripreso dalla legenda di Teseo e il filo di Arianna).
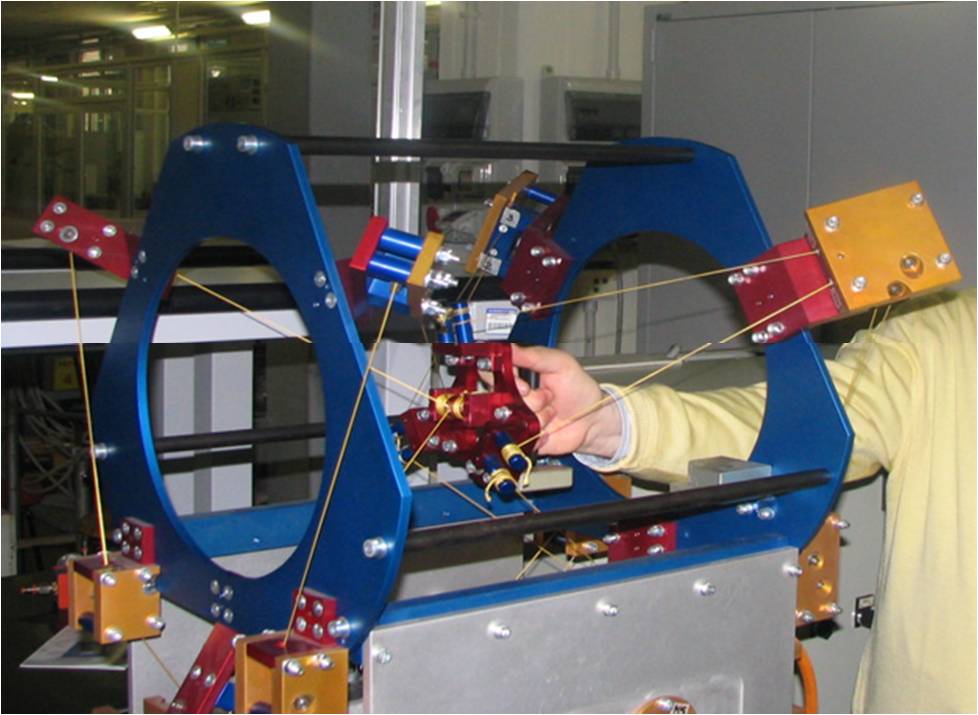
Prototipo WiRo 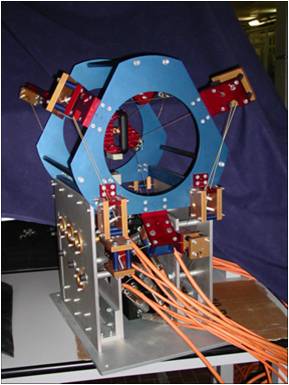
Prototipo WiRo 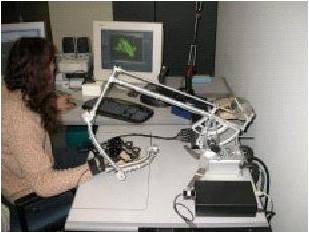
Guanto sensorizzato per interazione uomo-macchina 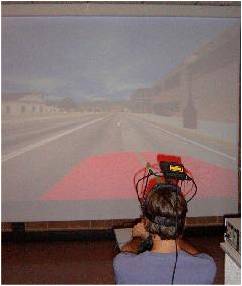
Dispositivo per la realtà aumentata 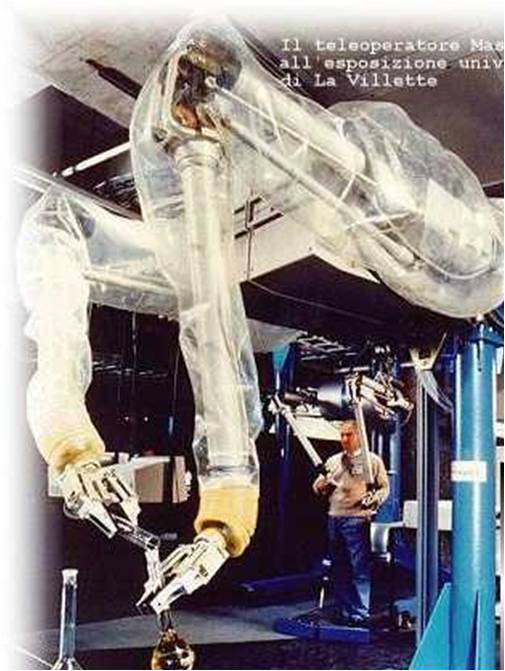
Teleoperatore Mascot